M5StickCであそぶ 〜6軸センサを使う〜


前回まではボタンとLED関係でしたが、今回は少し毛色を変えて6軸センサを使用したいと思います。
まず「6軸センサとはなんぞや」というところですが、少なくともM5StickC搭載のMPU6886(初期ロットはSH200Q)では「前後・左右・上下を検出できる加速度センサ+回転の速さを検出できるジャイロセンサの組み合わせで、姿勢、移動方向、回転を検出できるセンサ」という認識で良さそうです。完璧に使いこなすのは難しそうですが、少しかじるだけでも色々できることが増えそうです。自分が作った『カイザフォンX』とかはその一例だと思います。
加速度センサ・ジャイロセンサについては私も詳しいことはよくわかっていないため、こちらやこちらなどを参考に少し勉強させて頂きました。少しなので、以降の記述が間違っていたら申し訳ありません。
ちなみに9軸センサになると、6軸センサにさらに地磁気センサが加わって方位までわかるようになるみたいですね。6軸だと上下方向はわかりますが水平方向はわからない(=「自分から見てどの方向に動いたか」はわかるが「自分が今どの方角を向いているか」まではわからない)ので、作りたいアプリケーションによっては別に9軸センサが必要になることもあるかもしれません。
それでは早速プログラムしていきたいところですが、まずはその前提として「M5StickCと軸の向き」を確認しておきましょう。こちらやMPU6886のデータシートを参照させて頂くと、こんな感じになっているようです。
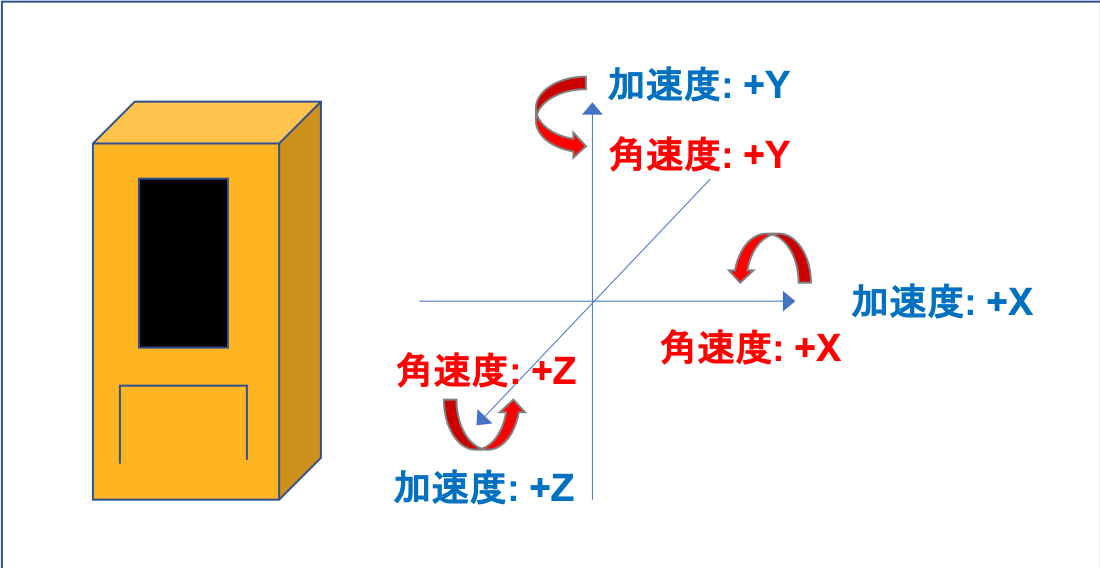
こちらのサイトの記述は初期ロットのSH200Qについてになっていますが、MPU6886でも向きは変わっていないようです。
これは私の備忘録的な記述になりますが、上記の絵を見ていると、「ふーん、じゃあ上図のような感じでM5StickCを置いておくと、重力加速度は-9.8[m/s^2]として検出されるんだな」と思ってしまうのですが、実際には+9.8[m/s^2]相当の値が出力されることになります。これで私はよく混乱してしまうのですが、加速度センサの立場で考えてみると、「自分には(重量加速度とは逆向きの)+9.8[m/s^2]の加速度が常時かかっているから静止できているんだ、その値を出力して見せてやっているのだ」ということになり、それならなんとなくですが納得できます。
さてそれからもう一つの確認ポイントとして、センサの出力してくる値の単位です。MPU6886のデータシートを参照すると、加速度は[g]、角速度は[dps (= degree / second)] のようですので、人によっては加速度は1[g] ≒9.8[m/s^2]の換算をした方がわかりやすいかもしれません。私はそうなので、以後のサンプルではこの換算をします。
ではでは早速、サンプルプログラムを書いていきます。今回は、「通常は加速度と角速度をリアルタイムに表示、ボタン操作でモードを切り替えると現在の姿勢(=どの軸が上を向いているか)を表示」という内容にしたいと思います。
#include <M5StickC.h>
#define MODE_A 0 // 数値表示
#define MODE_B 1 // 姿勢表示
uint8_t disp_mode = MODE_A;
#define BTN_A_PIN 37
#define BTN_ON LOW
#define BTN_OFF HIGH
uint8_t prev_btn_a = BTN_OFF;
uint8_t btn_a = BTN_OFF;
#define POSE_P_X 0
#define POSE_M_X 1
#define POSE_P_Y 2
#define POSE_M_Y 3
#define POSE_P_Z 4
#define POSE_M_Z 5
uint8_t pose = POSE_P_X;
uint8_t prev_pose = POSE_P_X;
// 加速度。センサで取得できる値の単位は[g]なので、通常の[m/s^2]単位で考えるなら9.8倍する
float accX_g = 0;
float accY_g = 0;
float accZ_g = 0;
float accX_mpss = 0;
float accY_mpss = 0;
float accZ_mpss = 0;
// 角速度。センサで取得できる値の単位は[dps, degree per second]
float gyroX_dps = 0;
float gyroY_dps = 0;
float gyroZ_dps = 0;
boolean near_p_g(float value){
if(8.0 < value && value < 12.0){
return true;
}else{
return false;
}
}
boolean near_m_g(float value){
if(-12.0 < value && value < -8.0){
return true;
}else{
return false;
}
}
boolean near_zero(float value){
if(-2.0 < value && value < 2.0){
return true;
}else{
return false;
}
}
///////////////////////////////////////////////////////////////
void setup() {
// Initialize the M5StickC object
M5.begin();
pinMode(BTN_A_PIN, INPUT_PULLUP);
// 6軸センサ初期化
M5.MPU6886.Init();
// LCD display
M5.Lcd.setRotation(1); // ボタンBが上になる向き
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
}
void loop() {
btn_a = digitalRead(BTN_A_PIN);
if(prev_btn_a == BTN_OFF && btn_a == BTN_ON){
M5.Lcd.fillScreen(BLACK);
if(disp_mode == MODE_A){
disp_mode = MODE_B;
M5.Lcd.setTextSize(3);
}else{
disp_mode = MODE_A;
M5.Lcd.setTextSize(1);
M5.Lcd.setRotation(1); // ボタンBが上になる向き
}
}
prev_btn_a = btn_a;
// 加速度取得
M5.MPU6886.getAccelData(&accX_g,&accY_g,&accZ_g);
accX_mpss = accX_g * 9.8;
accY_mpss = accY_g * 9.8;
accZ_mpss = accZ_g * 9.8;
// 角速度取得
M5.MPU6886.getGyroData(&gyroX_dps,&gyroY_dps,&gyroZ_dps);
if(disp_mode == MODE_A){
// 取得した値を表示する
M5.Lcd.setCursor(0, 30);
M5.Lcd.printf("Acc : %.2f %.2f %.2f ", accX_mpss, accY_mpss, accZ_mpss);
M5.Lcd.setCursor(0, 45);
M5.Lcd.printf("Gyro: %.2f %.2f %.2f ", gyroX_dps, gyroY_dps, gyroZ_dps);
}else{
// 現在の姿勢を検出する
if(near_zero(accX_mpss) && near_p_g(accY_mpss) && near_zero(accZ_mpss)){
pose = POSE_P_Y;
}else if(near_p_g(accX_mpss) && near_zero(accY_mpss) && near_zero(accZ_mpss)){
pose = POSE_P_X;
}else if(near_zero(accX_mpss) && near_zero(accY_mpss) && near_p_g(accZ_mpss)){
pose = POSE_P_Z;
}else if(near_zero(accX_mpss) && near_m_g(accY_mpss) && near_zero(accZ_mpss)){
pose = POSE_M_Y;
}else if(near_m_g(accX_mpss) && near_zero(accY_mpss) && near_zero(accZ_mpss)){
pose = POSE_M_X;
}else if(near_zero(accX_mpss) && near_zero(accY_mpss) && near_m_g(accZ_mpss)){
pose = POSE_M_Z;
}
// 姿勢に変化があった場合にのみ描画する
if(prev_pose != pose){
M5.Lcd.fillScreen(BLACK);
switch(pose){
case POSE_P_X:
M5.Lcd.setRotation(1);
M5.Lcd.setCursor(56, 16);
M5.Lcd.print("+X");
break;
case POSE_M_X:
M5.Lcd.setRotation(3);
M5.Lcd.setCursor(56, 16);
M5.Lcd.print("-X");
break;
case POSE_P_Y:
M5.Lcd.setRotation(0);
M5.Lcd.setCursor(16, 56);
M5.Lcd.print("+Y");
break;
case POSE_M_Y:
M5.Lcd.setRotation(2);
M5.Lcd.setCursor(16,56);
M5.Lcd.print("-Y");
break;
case POSE_P_Z:
M5.Lcd.setRotation(1);
M5.Lcd.setCursor(56, 16);
M5.Lcd.print("+Z");
break;
case POSE_M_Z:
M5.Lcd.setRotation(1);
M5.Lcd.setCursor(56, 16);
M5.Lcd.print("-Z");
break;
default:
;
}
}
prev_pose = pose;
}
delay(100);
}動作はこんな感じです。
簡易的な姿勢検出かもしれませんが、とりあえずはOKかなと思います。
ということで、6軸センサを使った姿勢検出のサンプルでした。6軸センサをちゃんと使いこなせば(自分視点の)「移動方向」と「回転方向」を検出することができるはずですが、今のところそれが必要なアプリケーションというのを特に思いつかないので、それらについては必要になったときにまた別途取り組んでみたいと思います。
次回はバッテリーについてです。